Motion Imitation
A methodological study of humanoid robots that imitate human motion
Motion Imitation
Survey
宇树官方开源kinect_teleoperate
kinect_teleoperate 该项目能够实现人体动作到宇树h1的动作映射。该项目使用Azure Kinect相机。Azure Kinect SDK包含两个部分,一个部分是camera SDK,用于获得视觉输入,一个部分是body tracking SDK用于身体骨架检测。这两个SDK配置具体可以看Readme文档。下面是一个demo: 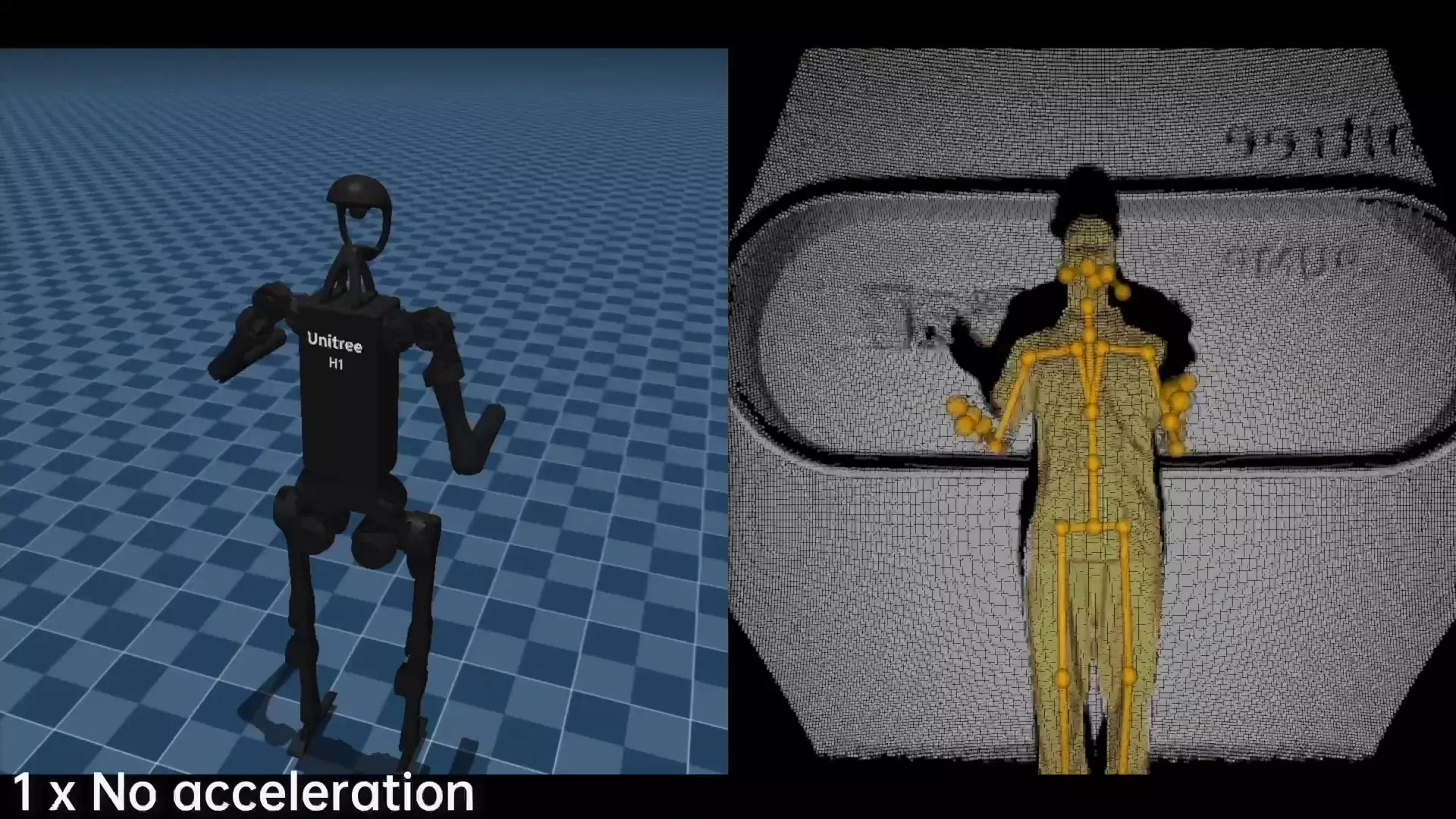 这个程序实现了对H1机器人双手臂的遥控功能,其中,单个手臂控制范围包括4个自由度:包括肩部俯仰关节、肩部滚动关节、肩部偏航关节和肘部俯仰关节。因此,整个系统可以同时控制双臂共 8 个自由度。同时官方视频演示中仅仅展示了遥操unitree h1机器人的demo,由于unitree g1机器人身体比例与人不一样,因此,该项目是否能够迁移到g1机器人,以及迁移到g1机器人上效果均保持疑问。 官方文档
这个程序实现了对H1机器人双手臂的遥控功能,其中,单个手臂控制范围包括4个自由度:包括肩部俯仰关节、肩部滚动关节、肩部偏航关节和肘部俯仰关节。因此,整个系统可以同时控制双臂共 8 个自由度。同时官方视频演示中仅仅展示了遥操unitree h1机器人的demo,由于unitree g1机器人身体比例与人不一样,因此,该项目是否能够迁移到g1机器人,以及迁移到g1机器人上效果均保持疑问。 官方文档
FLAM
该项目全称是Foundation Model-Based Body Stabilization for Humanoid Locomotion and Manipulation。目前强化学习是人形机器人控制的主要方法,但是之前的方法仅仅依赖task rewards,使得控制器对人形机器人的平衡控制效果不好。这篇论文提出了FLAM系统,该系统引入一个stabilizing reward function,使得控制器能够有效的学习人形机器人稳定的姿态。该系统具体流程如下:首先将机器人位姿映射到一个虚拟的3D人体模型。接着,通过一个motion reconstruction model去稳定与重建当人体位姿。紧接着使用重建之前的位姿与重建之后的位姿来计算稳定姿态奖励。具体流程如下: 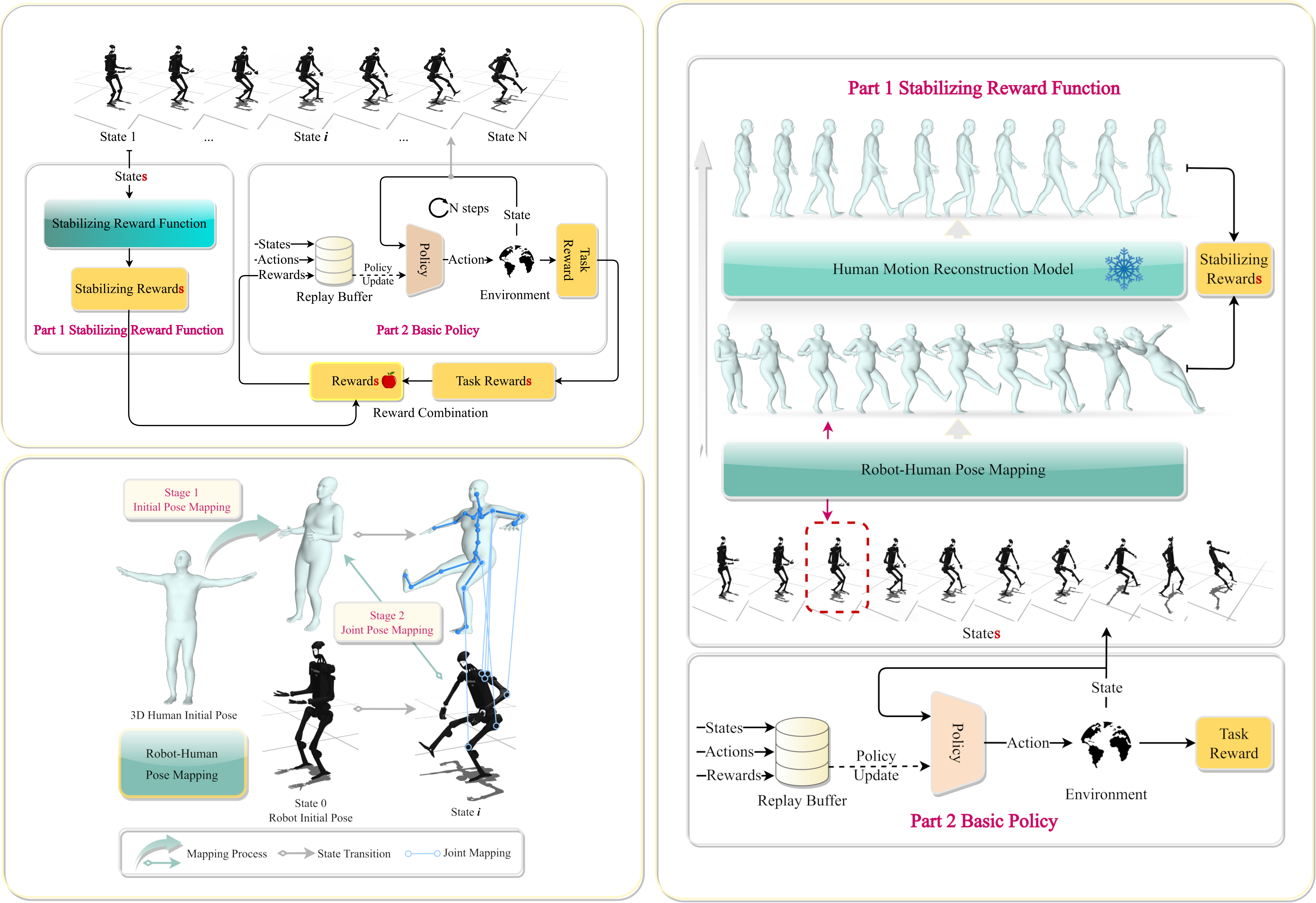 The pipeline of flam system 这个idea听起来不错,但是没有实物实验只有仿真实验,并且运动效果看起来不算太好。和我们的要求也不太一样,我们的需求不要求执行复杂的操作任务,而是人形机器人能够模仿人类的上肢动作。
The pipeline of flam system 这个idea听起来不错,但是没有实物实验只有仿真实验,并且运动效果看起来不算太好。和我们的要求也不太一样,我们的需求不要求执行复杂的操作任务,而是人形机器人能够模仿人类的上肢动作。
I-CTRL
I-CTRL: Imitation to Control Humanoid Robots Through Constrained Reinforcement Learning
仿人机器人具有以高视觉保真度模仿人类动作的潜力,但将这些动作转化为实际的物理执行仍是一项重大挑战。图形学领域的现有技术往往优先考虑视觉保真度,而不是基于物理的可行性,这对在实际应用中部署双足系统构成了巨大挑战。本文通过引入一种约束强化学习算法来解决这些问题,该算法可在腿部仿人机器人上生成基于物理的高质量运动模仿,在成功遵循参考人体轨迹的同时增强运动相似性。I-CTRL将运动模仿重新表述为对非基于物理的重定向运动的约束精炼。I-CTRL在动作模仿方面表现出色,其奖励简单独特,适用于四种机器人。此外,我们的框架还能通过独特的 RL 代理跟踪大规模运动数据集。所提出的方法标志着在推进双足机器人控制方面迈出了关键的一步,强调了将视觉和物理逼真性结合起来以成功实现运动模仿的重要性。 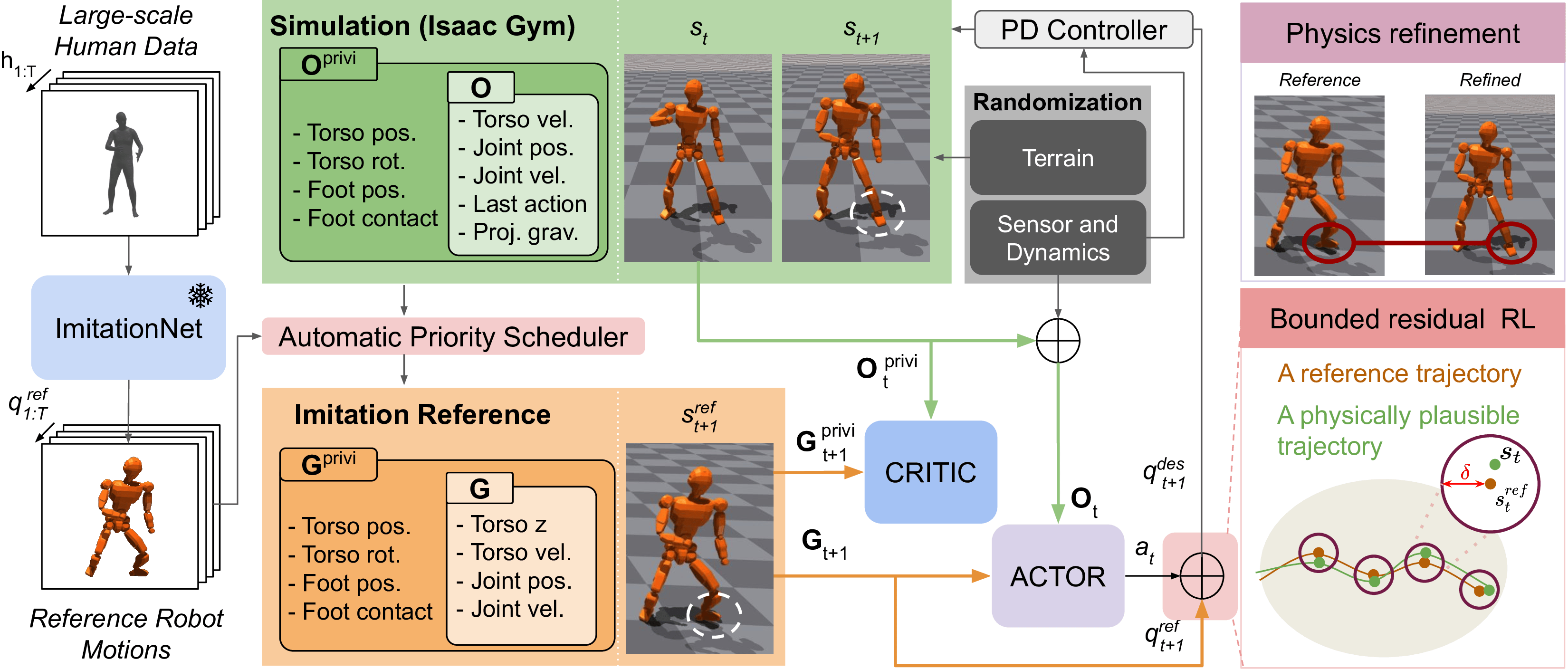 The pipeline of I-CTRL system 尽管效果看起来不错,但是作者没有放出源代码,并且没有实物试验验证方法的可迁移性。
The pipeline of I-CTRL system 尽管效果看起来不错,但是作者没有放出源代码,并且没有实物试验验证方法的可迁移性。
Exbody2
Exbody2:Advanced Expressive Humanoid Whole-Body Control
这篇文章使人形机器人能够在像人类一样做出富有表现力的动作。这篇论文提出的Exbody2是一个通用的全身跟踪框架,它可以接受任何参考运动输入,并控制仿人机器人模仿该运动。该模型通过强化学习进行模拟训练,然后sim2real到现实世界中。该论文将关键点跟踪与速度控制分离开来,并有效地利用teacher-student结构,将精确的模仿技能提炼到目标学生策略中,从而能够高保真地复制跑步、蹲下、跳舞等动态动作以及其他具有挑战性的动作。这篇论文在两个人型机器人上进行了实验,展示了众多动作,证明了方法的有效性。
这篇论文效果看起来不错,感觉具有复现价值。